
HACKATHON
En la semana 4, nuestro equipo desarrollo varias estrategias de solución bajo un determinado estudio durante 24 horas
ESTRATEGIA 1-Motores vibratorios sincronizados al movimiento
La primera estrategia consta de un equipo portable en forma de guante hasta la altura de la muñeca que tiene como función reducir los temblores producidos en la mano. Se utilizará efecto de vibración rítmica que se basa en la compensación del temblor parkinsoniano por la vibración de motores pequeños a una frecuencia específica que se oponga a la oscilación de este en desfase destructivo.
Junto a esto es importante tomar en cuenta los parámetros requeridos para producir la vibración con el fin de generar una supresión del temblor, mas no de inducir movimiento oscilatorio que supere su objetivo y que provoque mayor descontrol al hacer vibrar el brazo. Para esto, debemos determinar la frecuencia natural de nuestro usuario, entonces se empleará alguna formulación que procese los y extraiga información acerca del temblor de un paciente en específico.
En cuanto al funcionamiento de esta solución, se planea utilizar dos motores vibratorios pequeños que se coloquen en la mano y que ejerzan su función constantemente. Dichos artefactos se moverán de manera longitudinal de arriba abajo y por tanto deben ser ubicados en zonas opuestas de la mano. Asimismo su acción debe ser correspondida a cada frecuencia de los temblores para obtener resultados inmediatos y personalizados. El uso de un sensor IMU6050 que contenga giroscópio y acelerómetro se encargará de cumplir con la estracción de datos entanto que el nano arduino los procese; y así conocer las frecuencias de vibración generadas por el temblor. Es así como se prevee que la parte electrónica será fundamental para el funcionamiento de este dispositivo que nos ayudará a determinar la frecuencia natural del sistema (en este caso persona).
Con respecto al material, en nuestro caso la persona no sufre de alergias y usar impresión 3D no presenta inconveniente alguno. Para el correcto funcionamiento del equipo se colocarían 2 motores de vibración rítmica en la mano a la altura del dedo pulgar y por debajo del meñique, esto con el fin de que ambos vibrando a la vez reduzcan considerablemente los temblores en la mano, ya que la tembladera producida por la mano en el Parkinson se produce de manera transversal y estos vibradores que vibran en forma longitudinal compensarian el movimiento por ambos lados. Si bien se presentan inconvenientes tales como la detección correcta del movimiento por parte del aparato y el momento en cual debe empezar o dejar de vibrar, estos se pueden solucionar con una serie de ecuaciones programadas en arduino, además para que los sensores no vibren sin ningún motivo se le indicará que luego de 5 segundos de movimiento periódico transversal por parte de la mano que deben empezar a vibrar y para finalizar su acción la persona solo debe apagar y volver a prender el arduino. Adicionalmente el equipo también ayuda en los movimientos involuntarios.
ESTRATEGIA 2-Estabilizador Mecánico
Se planea utilizar la tecnología de los sistemas de suspensión cardán, tecnología que consiste en el uso de un giroscopio para mantener el movimiento en equilibrado en un solo eje, despreciando los efectos de alteraciones sobre los otros. En sí, este equipo tiene una serie de horquillas acoplados una dentro de otra conectadas por dos líneas de transmisión que transmita la rotación de un eje hacia el otro de manera que se mantenga una relación perpendicular entre cada eje en los dos primeros anillos y que el tercero se mantenga como estuvo inicialmente. Más aun, este efecto ocasionado puede ser potenciado si se incita usar el giroscopio para su propio fin, es decir, hacerlo girar. Lo que ocasionará es que el sistema se mantenga mucho más estático en el plano del movimiento ya que conserva el momento angular en la dirección inicial de su giro, haciendo que el anillo central tenga un movimiento sustentable e independiente respecto los demás. El efecto se dará al despreciar inconformidades de la transmisión de movimiento por las horquillas ya que por razones técnicas no existirá una uniformidad en la alineación angular.
Para lograr los efectos esperados debemos tomar en cuenta la masa del sistema y su soporte. Debemos tomar en cuenta que la mano va a temblar y por consiguiente el dispositivo va a estar bajo la acción de fuerzas en varias direcciones que tiene que resistir y recomponer. Aspectos como la masa de la mano, la frecuencia o amplitud de movimientos son parámetros que no se pueden ignorar a la hora de desarrollar una solución como esta.
Ahora bien, el dispositivo que desarrollaremos debe atender al problema de la alimentación del paciente por lo que pensamos en algo que pueda lidiar con esto. El uso de este estabilizador no está direccionado a estabilizar la mano, sino a estabilizar un eje paralelo al del antebrazo que sostenga un mango al cual se le pueda acoplar una cuchara.
-Fundamentos de Ingeniería. Universidad de Córdova. [s.f.]. Recuperado de: http://www.uco.es/users/fa1orgim/archivos/practicas/PLS3P4-5.pdf
- Mecanismos: Juntas articuladas y Universales. [s.f.]. Recuperado de: https://www.frbb.utn.edu.ar/frbb/images/carreras/elementosdemaquinas/cap02-03.pdf
ESTRATEGIA 3- Muñequera con estimulación eléctrica funcional
Consiste en una banda elástica impermeable con EEF y retroalimentación sensoriomotora, que se colocaría por encima de la epífisis distal de la articulación radioulnar hasta el límite superior del tendón que se conecta con el músculo extensor de los dedos; similar al ancho del pronador cuadrado. Se eligió este ancho para que no interfiriera con la compresión de los músculos del antebrazo al momento de ejercer fuerza al levantar un objeto u otras actividades cotidianas. Se debe tener en cuenta los umbrales de tolerancia para evitar sensaciones molestas y controlar los parámetros de intensidad y frecuencia de estimulación.
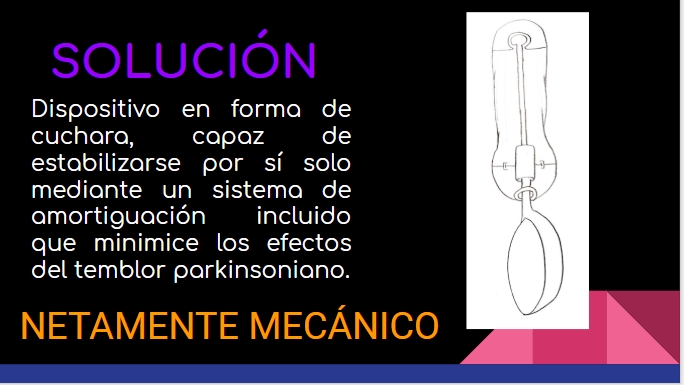
ESTRATEGIA DE SOLUCIÓN: Cuchara Estabilizada por Amortiguadores
La solución planea ser una cuchara que se estabilice por si sola de forma mecánica y simple. Esta última estrategia busca aprovechar las propiedades viscoelásticas de algún fluido que sea capaz de amortiguar el movimiento oscilatorio generado por los temblores. Es así como el efecto del movimiento aleatorio se verá considerablemente reducido haciendo posible que el paciente pueda comer con normalidad, llevando alimentos a su boca de forma independiente.
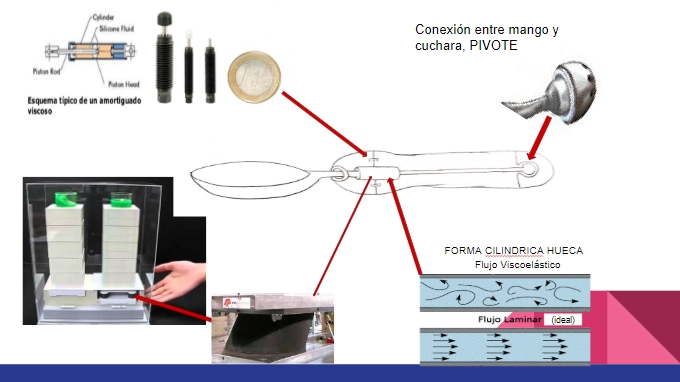
El fundamento físico se encuentra en que el amortiguamiento se puede representar como una función de la reducción velocidad cuando se ejerce una fuerza sobre un objeto, conectado a un amortiguador, que provoque su oscilación. En efecto, las propiedades del amortiguador determinarán la capacidad que este tiene para reducir el movimiento lo mayor posible. Los fluidos viscoelásticos son sustancias utilizadas para este fin y se acoplan muy bien a un sistema amortiguado por sus características deformables y elásticas. Se busca una alta densidad en uno de estos que garantice la viscosidad y entonces su rendimiento como amortiguador.
Para llevar a cabo esta solución hemos diseñado un prototipo que incluya una cuchara tan solo puesta dentro de un mango de tal manera que pueda moverse independientemente. Proponemos conectar esta cuchara al mango por medio de una articulación de tipo bola-zócalo que mantenga a estos dos conectados y también crear un punto de pivote sobre el cual la cuchara pueda rotar por los temblores. Ahora bien, la cuchara se volverá una barra propensa a recibir fuerzas de torque fácilmente, por lo tanto, nos vemos obligados a evitar estas. Tomando en cuenta que las fuerzas que presentes más lejanas del punto de pivote hacen más brazo de palanca, nuestro objetivo es fijarnos en esta zona y amortiguarla por medio de un fluido viscoelástico. Así, ya controlando las repentinas fuerzas del torque generado por la mas de la cuchara y los movimientos oscilatorios del temblor, es posible mantener a la cuchara muy estable.


REFERENCIAS -
Deuschl, G., Raethjen, J., Baron, P., Krack, P., Linderman, M., Wilms, H. (2000). The pathophysiology of parkinsonian tremor: A review. Recuperado de: https://www.researchgate.net/publication/12245591_The_pathophysiology_of_parkinsonian_tremor_A_review
- Fernandez, W. ¬[s.f.]. Temblor: Diagnóstico diferencial y tratamiento. Recuperado de: http://www.acnweb.org/guia/g2c06i.pdf
- Estimulación Cerebral Profunda. [s.f.] Hospital Universitario Marqués de Valdecilla. Recuperado de: http://neurocirugia.humv.es/uploads/foto/file/42/Estimulaci_n_profunda.pdf
- Zhang, H. (2017). Project Emma. Microsoft. Recuperado de: https://www.microsoft.com/en-us/research/project/project-emma/
- Jones, B.(2017).We can’t still cure Parkinson’s, but tech is making life easier for suffers. Digital Trends. Recuperado de: https://www.digitaltrends.com/cool-tech/projects-backed-by-google-and-microsoft-are-tackling-parkinsons-disease/
-
-
Gyroglove: Stabilising Life. [s.f.]. Gyrogear. Recuperado de: http://edge.rit.edu/edge/P17044/public/Tremor%20Research/State_of_Technology/GyroGlove1.pdf
-
Rómulo, D. (2017). Técnica chilena contra el Parkinson muestra resultados a nivel mundial. Facultad de Medicina Universidad de Chile. Recuperado de: http://www.medicina.uchile.cl/noticias/135219/tecnica-chilena-contra-el-parkinson-muestra-resultados-a-nivel-mundial.
-
Syed, N., Raza, H. [s.f.].TAME: Device for tremor control and minimization. EFSER. Recuperado de: http://efser.eu/responsible-innovation/social-protection/tame-device-for-tremor-control-and-minimization/
-
Pathak, A., Redmond, J., Allen, M., & Chou, K. (2013). Un dispositivo de asistencia portátil no invasivo para acomodar el temblor esencial: un estudio piloto. Recuperado de: https://onlinelibrary.wiley.com/doi/full/10.1002/mds.25796